لایدار و مقایسه آن با فتوگرامتری
لایدار چیست؟
واژه Lidar مخفف Light Detection And Ranging است و از نظر لغوی به معنای آشکارسازی نور و پیمایش است. لایدار در واقع یک روش سنجش از دور اپتیکی یا نوری است که از خصوصیات نور لیزر منتشر شده برای تعیین ویژگی های خاص اشیا دور و سطح زمین استفاده می کند، نتایج این روش مقادیر X Y Z بسیار دقیقی ارائه می کند.
این روش عموماً برای نقشه برداری های هوابرد استفاده می شود، که بعنوان یک جایگزین مقرون به صرفه برای روشهای نقشه برداری سنتی مانند فتوگرامتری بکار می رود. نتایج حاصل از بکارگیری این تکنیک، ایجاد یک مجموعه داده ابرنقطه (Point Cloud) است که به راحتی می توان در نسخه های جدید نرم افزار ArcGIS استفاده نمود.
لایدار در واقع یک سنسور فعال نوری است که پرتوهای لیزر را به سوی یک هدف هدایت می کند این در حالی است که در یک مسیر نقشه برداری خاص وسیله نقلیه (خودرو، هواپیما، هلی کوپتر) حرکت می کند. در ادامه بازتاب نور لیزر از هدف شناسایی شده و توسط گیرنده های لیزر در سنسور لایدار تحلیل می شود.
تاریخچه لایدار:
در حقیقت کهن ترین قول معروف در سیستم های لیدار را می توان به میلیونها سال قبل و با الهام از محیط طبیعت اشاره نمود . بررسی در نحوه شناسایی شکار توسط جغدها (با ارسال صدا ودریافت موج برگشتی از پدیده ها توسط آنتنها(گوش) موانع و شکار را تشخیص می داد) ،که این به سونار((sonarمعروف است و سپس این ایده درقرن 20 میلادی و با تحقیقات توسط انسانها توسعه داده شد و رادار ساخته شد. کریستین داپلر 4 ریاضیدان واخترشناس اتریشی تحقیقاتی را درزمینه انعکاس نور رنگی از ستاره ها( نسبت سرعت نور از منبع وهدف) انجام داد.
در 1917 آلبرت انشتین اساس وبنیان تئوری لیزر را اثبات ومحقق نمود واین درمقاله تئوری تابش کوانتوم 5 در مدت بین سالهای 1928 تا 1970 نیز تحقیقات ومطالعات مختلفی در زمینه موج های کوتاه و نور وتوسعه لیزر توسط دانشمندان انجام گرفت.ايده اندازهگيري خواص محيط با استفاده از پرتوهاي نوري براي اولين بار توسط سينگ در سال 1930 براي اندازهگيري خواص جو ارايه گرديد. او پيشنهاد نمود که با استفاده از يک منبع نوري و يک تلسکوپ با دهانه بزرگ ميتوان اطلاعاتي در مورد جو به دست آورد. منبع استفاده شده توسط او يک منبع پالسي بود به همين خاطر او توانست فاصله پراکندگيهاي اتفاق افتاده را با استفاده از زمان رفت و برگشت پرتو نوري به دست آورد. سيستمهاي دورحسي نوري در دو نوع آرايش همجوار (منبع نوري و سيستم دريافتکننده در يک محل قرار ميگيرند) و غيرهمجوار(که منبع نوري و سيستم دريافتکننده در فاصله زيادي از هم قرار داده ميشوند) وجود دارند. اولين نتايج استفاده از روش غيرهمجوار در سال 1936 توسط دوک لاکس و هالبرت با محاسبه نمايه غلظت جو منتشر گرديد و اودر سال 1938 براي اولين بار سيستم همجوار را براي اندازهگيري ارتفاع ابرها بهکار برد. اولين بار در سال 1961 مخترعي ايراني بنام پروفسور علي جوان در آمريكا گازي را ابداع نمود كه در ترازيابي ها با گستردگي فوق العاده مورد استفاده قرار گرفت. درسال 1970 تحقیقاتی انجام داد.
لیدار (LiDAR)یا اسکن لیزر سه بعدی، در دهه ۱۹۶۰ برای شناسایی زیردریایی از هواپیما مورد استفاده قرار گرفت.
مدل های اولیه در اوایل دهه ۱۹۷۰ در ایالات متحده، کانادا و استرالیا مورد استفاده قرار گرفت.
در ده سال گذشته، استفاده از سنسورهای لیدار در انگلیس گسترش یافته است، که چندین بار به طور منظم در هر دو مورد استفاده از هواپیما و زمین مورد استفاده قرار گرفته است. این امر با افزایش آگاهی و درک سیستم لیدار در صنایع که قبلا غیر مرتبط بوده است، به عنوان کاربرد سیستم لیدار تصویب شده است.
لایدار یا فتوگرامتری؟
با پیشرفت های اخیر در زمینه نقشه برداری پهپادی، نقاط ضعف و تصورات اشتباهی در مورد لیدار و فتوگرامتری به وجود آمده است. در واقع، این دو تکنولوژی با وجود شباهت های زیاد، تفاوت هایی ظریفی با هم دارند. بنابراین، دانستن این مطالب که آنها محصولات متفاوتی تولید می کنند و در شرایط مختلفی داده اخذ می کنند و مهمتر از همه، برای اهداف مختلفی استفاده می شوند، امری ضروری است.
شکی نیست که هر دو تکنولوژی در مقایسه با روش های سنتی نقشه برداری زمینی، نتایج را بسیار سریعتر و با تراکم بسیار بالاتر برداشت می کنند. با این وجود، انتخاب بهترین تکنولوژی برای هر پروژه ای، به عوامل مختلفی بستگی دارد که مهمترین آنها نوع استفاده، شرایط محیطی، نوع خروجی ها و میزان بودجه قابل تخصیص می باشد.
این دو تکنولوژی چطور کار می کنند؟
بیایید از ابتدا شروع کنیم و نگاهی دقیق تر به دانش ورای این دو تکنولوژی بیندازیم.
در این لایدار دسته پرتوهای لیزر توسط سنسور لایدار به سمت بیرون پرتاب می شوند و زمان رفت و برگشت نور اندازه گیری میشود. این سیستم، یک سیستم فعال است. یعنی تشعشعات لیزر را که از منبع انرژی داخلی خودش ساطع شده، پس از بازتاب از عوارض روی زمین دریافت می کند. در مقابل، فتوگرامتری یک تکنولوژی غیرفعال است که بر اساس تصاویر دو بعدی منتقل شده به فضای مدل سه بعدی کار می کند. در واقع این تکنولوژی از اصول ویدئوهای سه بعدی و یا چشم انسان هنگام دید سه بعدی و درک عمق اشیا پیروی می کند و به کاربر اجازه میدهد اشیا را به صورت سه بعدی مشاهده و اندازهگیری کند. از محدودیت های فتوگرامتری این است که تنها میتواند نقاط را بر اساس مقدار نوری که سنسور دوربین میتواند تشخیص دهد، تولید کند.
به طور خلاصه، لیدار از لیزر برای اندازهگیری استفاده میکند. در حالی که فتوگرامتری، اندازه گیری ها را بر مبنای تصاویر اخذشده ای که پردازش و ترکیب می شوند، انجام می دهد.
خروجی های دو تکنولوژی لیدار و فتوگرامتری
محصول اصلی نقشه برداری با لیدار یک ابر نقطه سه بعدی است. تراکم ابر نقطه به ویژگی های سنجنده (فرکانس اسکن و نرخ تکرار) و همچنین پارامترهای پرواز بستگی دارد. با فرض اینکه اسکنر، با نرخ ثابت پالس بفرستد و نوسان کند، چگالی ابر نقطه به ارتفاع پرواز و سرعت هواپیما بستگی دارد.
در موارد استفاده مختلف، ممکن است نیاز به ابر نقطه با پارامترهای مختلفی باشد. برای مثال، هنگام مدلسازی خطوط برق، شما ممکن است به ابر نقطه ای با بیش از ۱۰۰ نقطه در هر متر مربع نیاز داشته باشید. در حالی که برای ایجاد مدل رقومی سطح زمین از یک منطقه روستایی تعداد ۱۰ نقطه در هر متر مربع، کافی می باشد.
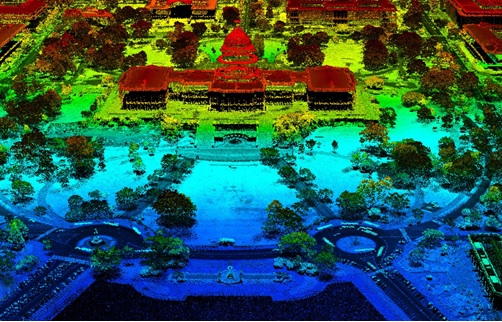
همچنین، مهم است بدانید که سنجنده لیدار نمونه برداری موقعیت را بدون برداشت تصویر RGB انجام می دهد و یک مجموعه داده تک رنگ ایجاد میکند. این موضوع در مواقع تفسیر، میتواند چالشبرانگیز باشد. در چنین مواقعی برای آنکه خروجی ها معنی دار تر شوند، معمولا داده با استفاده از ترکیب رنگی کاذب بر اساس ارتفاع و یا بازتاب عارضه به صورت بصری قابل مشاهده می شود.
می توان برای ترکیب رنگی داده های لیدار در فرآیند پس پردازش، آن ها را با تصاویر یا داده هایی از منابع دیگر ترکیب کرد اما این خود به پیچیدگی فرآیند پردازش می افزاید. همچنین، رنگ ها می توانند بر اساس طبقه بندی اضافه شوند.
در سوی دیگر، فتوگرامتری می تواند مدل های دو بعدی و سه بعدی از سطح زمین در باندهای طیفی مختلف، تولید کند. این تصویربرداری در باندهای مختلف، باعث مشاهده بصری و تفسیر آسان تر نسبت به نتایج لیدار می شود. خروجی اصلی نقشه برداری فتوگرامتری تصاویر خام، تصاویر ارتو، مدل های رقومی سطح و ابر نقاط سه بعدی است که از کنار هم قرار گرفتن و پردازش صدها یا هزاران تصویر ایجاد شده اند. خروجی ها کاملا بصری هستند و رزولوشن آن ها حتی می تواند کمتر از ۱ سانتی متر باشد.
با توجه به این نکته، به نظر می رسد که فتوگرامتری، تکنولوژی است که موارد استفاده آن در جاهایی است که ارزیابی بصری مورد نیاز است. (مثلا در بازرسی ساختمان ها، مدیریت دارایی و کشاورزی). از سوی دیگر، لیدار ویژگی های خاصی دارد که به خاطر آن ویژگی ها، برای کاربردهای خاص، پراهمیت می باشد.
پرتوهای لیزر به عنوان یک تکنولوژی سنجنده فعال می تواند در پوشش گیاهی نفوذ کند. لیدار می تواند از طریق فضای خالی بین شاخ و برگ درختان به زمین و عوارض زیر پوشش گیاهی برسد. بنابراین می تواند برای تولید مدل های رقومی سطح زمین مفید باشد.
همچنین لیدار برای مدلسازی عوارض باریک مانند خطوط برق یا برج های مخابراتی مفید است. چرا که فتوگرامتری ممکن است قادر به تشخیص عوارض باریک و عوارضی که به سختی مشاهده می شوند، نباشد. علاوه بر این، لیدار می تواند در شرایط نور کم و حتی شب هم کار کند. ابر نقاط فتوگرامتری بیشتر بصری هستند (یعنی هر پیکسل دارای مقادیر RGB است). اما اغلب دارای جزئیات کمی هستند. به همین دلیل هم برای مشاهده عوارضی که سطح دقت هندسی پایینی نیاز دارند، مناسب است. اما برای تفسیر بصری، تا حد زیادی خوب است.
دقت لایدار یا فتوگرامتری :
بیایید از تعریف دقت شروع کنیم. در نقشه برداری، دقت همیشه دو بعد دارد: نسبی و مطلق. دقت نسبی، عبارت است از اینکه عوارض نسبت به هم در چه موقعیتی قرار گرفته اند. دقت مطلق به اختلاف بین موقعیت عوارض و موقعیت واقعی آنها روی زمین اشاره دارد.
لیدار یکی از دقیق ترین روش های نقشه برداری است. به ویژه برای لیزرهای زمینی که در آن ها سنجنده روی زمین قرار گرفته و محل دقیق آن با استفاده از روشهای ژئودتیکی تعیین می شود. چنین تنظیماتی منتج به دقتی در سطح زیر سانتی متر می شود. از آنجایی که سنجنده لیدار در حال حرکت است، دستیابی به دقت بالا با لیدار هوایی سخت تر است. به همین دلیل، همیشه سنجنده های لیدار هوایی به یک IMU (واحد حرکت اینرسیایی) و گیرنده GNSS که اطلاعات موقعیت، چرخش و حرکت سکو را فراهم می کند، مجهز شده اند. همه این داده ها در فرآیند پرواز ترکیب می شوند تا دقت نسبی بالایی (در حدود ۱ تا ۳ سانتی متر) را ارائه دهند. برای دستیابی به دقت مطلق بالا، اضافه کردن یک تا دو نقطه کنترل زمینی (GCP) و چند نقطه چک با هدف ارزیابی نیاز است. در بعضی موارد که به دقت موقعیت یابی GNSS اضافی نیاز است، می توان از سیستم موقعیت یابی پیشرفته RTK/PPK UAV بهره گرفت.
همچنین، فتوگرامتری هم می تواند دستیابی به سطح دقت ۱ تا ۳ سانتی متر را ممکن کند. البته به شرط آنکه سخت افزار مناسب، پارامترهای پرواز و فرآیند پردازش داده را به درستی انتخاب کنیم. دستیابی به سطح دقت مطلق بالا، با استفاده از تکنولوژی RTK/PPK و GCP های اضافی و یا تنها با تعداد قابل توجهی GCP ممکن می شود. با این وجود، با استفاده از پهپاد DJI Phantom-class پانصد دلاری، و چندین GCP می توانید به دقت مطلق بین ۵ تا ۱۰ سانتی متر برای مناطق نقشه برداری کوچک دست یابید که این می تواند برای بیشتر مواقع مناسب باشد.
اخذ داده، پردازش و کارایی :
تفاوت های قابل توجهی بین سرعت اخذ داده دو تکنولوژی شرح داده شده در بالاوجود دارد. در فتوگرامتری، یکی از پارامترهای حیاتی برای پردازش دقیق داده ها، پوشش مشترک بین دو عکس است که می بایست در حدود ۶۰ تا ۹۰ درصد (از کنار و از جلو) باشد که مقدار آن به ساختار سطح زمین و سخت افزار به کار گرفته شده بستگی دارد. نقشه برداری با لیدار معمولی تنها به ۲۰ تا ۳۰ درصد همپوشانی بین خطوط پرواز نیاز دارد که این موجب افزایش سرعت اخذ داده ها می شود.
علاوه بر این، برای داشتن دقت مطلق بالا در فتوگرامتری، نیازمند نقاط GCP بیشتری هستیم تا به سطح دقت لیدار برسیم. اندازه گیری نقاط GCP معمولا روش های نقشه برداری زمینی قدیم را نیاز دارد که به معنای زمان و هزینه اضافی است.
علاوه بر این، پردازش داده های لیدار بسیار سریع است. داده های خام فقط چند دقیقه زمان نیاز دارند (بین ۵ تا ۳۰ دقیقه) تا فرآیند کالیبراسیون و تولید محصول نهایی را انجام دهند. در فتوگرامتری، بیشترین زمان کل فرآیند، صرف پردازش داده ها می شود. بنابراین، این فرآیند نیاز به کامپیوترهای قوی دارد که بتوانند پردازش حجم عظیم تصاویر را انجام دهند. پردازش داده ها به طور متوسط بین ۵ تا ۱۰ دقیقه بیشتر نسبت به اخذ داده ها در محل مورد مطالعه به طول می انجامد.
از سوی دیگر، برای بسیاری موارد از جمله برداشت خطوط برق، ابر نقاط لیدار نیاز به طبقه بندی های اضافی دارد که ممکن است بسیار کارآمد باشد و البته به نرم افزار های خاص (مانند Terrascan ) نیاز است.
هزینه :
وقتی به مجموعه هزینه های نقشه برداری با لیدار و فتوگرامتری نگاهی می اندازیم، چندین آیتم باید در نظر گرفته شود. اول از همه سخت افزارهاست. مجموعه پهپاد لیدار (شامل اسکنر، IMU و GNSS) بین ۵۰،۰۰۰ تا ۳۰۰،۰۰۰ دلار هزینه دارد. اما برای بیشتر موارد استفاده، گرانترین مدل محصول ترجیح داده می شود. هنگامی که شما بر روی چنین سنجنده ای سرمایه گذاری می کنید، شما به هیچ وجه نمی خواهید تصادفی به آن آسیبی برسد. با این فرض، اکثر کاربران هزینه اضافی ۲۵،۰۰۰ تا ۵۰،۰۰۰ دلاری را برای خرید پهپاد مناسب صرف می کنند. همه اینها تا ۳۵۰،۰۰۰ دلار برای یک مجموعه نقشه برداری به تنهایی هزینه دارد.
در فتوگرامتری، همه آنچه که نیاز داریم، یک هواپیمای بدون سرنشین مجهز به دوربین است و این بسیار ارزان تر است. با هزینه ای بین ۲،۰۰۰ تا ۵،۰۰۰ دلار شما می توانید انتخاب گسترده ای از بین دستگاههای عمودپرواز حرفه ای مانند DJI Inspire داشته باشید. با هزینه ای در حدود ۵،۰۰۰ تا ۲۰،۰۰۰ دلار، می توانید مجموعه ای دارای RTK/PPK مانند DJI Matrice 600 آمریکایی و یا پهپادهای بال ثابت مانند Sensfly eBee و PrecisionHawk Lancaster تهیه کنید.
آیتم موثر دیگر در هزینه، نرم افزار پردازش است. در مورد لیدار، معمولا نرم افزار به صورت رایگان و به همراه سنجنده از کمپانی سازنده به مشتری تحویل داده می شود. با این حال، فرآیند پس پردازش، مانند طبقه بندی ابر نقاط، ممکن است نیاز به نرم افزار ۳rd party داشته باشد. این نرم افزار برای مثال می تواند Terrascan باشد. که هزینه آن در حدود ۲۰،۰۰۰ تا ۳۰،۰۰۰ دلار در ازای یک لایسنس تکی است. قیمت نرم افزارهای فتوگرامتری نزدیک به ۲۰۰ دلار برای یک لایسنس در ماه است.
بدیهی است که یکی دیگر از عوامل مهم که هزینه خدمات را تحت تاثیر قرار می دهد، کار انجام شده و زمان است. در اینجا، لیدار مزایای قابل توجهی نسبت به فتوگرامتری دارد. زیرا نه تنها نیاز به زمان کمتری برای پردازش داده ها دارد، بلکه نیاز به GCP ندارد. به طور کلی بستگی به مورد استفاده و پروژه، خدمات فتوگرامتری معمولا ارزان تر از لیدار هستند، صرفا به این دلیل که نیازی نیست سرمایه زیادی صرف سخت افزارهای مورد استفاده در فتوگرامتری شود. با این حال در برخی موارد، افزایش بهره وری که با لیدار می آید، می تواند هزینه های بالای آن را جبران کند.
شاید این مطلب برای شما جالب باشد : پرسش های متداول در خصوص خرید عکس های هوایی
مزایا و معایب لایدار:
۱. از پرتوها یا امواج لیزری استفاده می کندفنآوری LiDAR از پالسهای نوری و یا پرتوهای لیزری برای تعیین فاصله بین حسگر و شی استفاده میکند . لیزر به سمت هدف حرکت میکند و پس از برخورد به منبع انعکاس مییابد و زمان صرفشده برای رفت و برگشت لیزر محاسبه میشود و سپس برای محاسبه فاصله استفاده میشود.
۲. اندازهگیری دقیق فاصلهبه دلیل ماهیت پالسهای لیزری، LiDAR اغلب برای اندازهگیری فواصل دقیق یک شی استفاده میشود. پالسهای لیزری به سرعت نور حرکت میکنند که دقت اندازهگیری را افزایش میدهد.
۳- چگالی جوی و جریانهای اتمسفری را اندازهگیری میکنند
می توان از فنآوری lidar برای اندازهگیری چگالی جوی اجزای مختلف مانند ذرات معلق و دیگر گازها استفاده کرد. علت آن این است که پالس دقیقتر بوده و طولموج کوتاهی دارد که میتواند برای بدست آوردن دادههای دقیق به کار رود.
۴- تولید تصاویر سهبعدی با وضوح بالا
فنآوری LiDAR قادر به ایجاد تصاویر وضوح بالا از یک شی در هر سطحی است و به همین دلیل است که در نقشهبرداری و دیگر کاربردهای توپوگرافی از آن استفاده میشود. براساس سرعت پالس لیزری از سنسورهای LiDAR، دادهها به سرعت و با نتایج دقیق برگردانده میشوند.
۵- تحتتاثیر دود، باران و مه قرار دارد
برخلاف فنآوری RADAR ،امواج LiDAR تحتتاثیر منفی شرایط آب و هوای اتمسفر چون مه غلیظ ، دود و حتی باران قرار میگیرند. پالسهای نوری در طول پرواز دستخوش تغییر خواهند شد و این امر بر صحت دادههای جمعآوریشده تاثیر خواهد گذاشت.
۶. دقت اندازهگیری بالاتری دارد
برخلاف RADAR، دادههای LiDAR به دلیل سرعت و طولموج کوتاه دارای دقت بالاتری هستند. همچنین LiDAR اشیا ویژهای را هدف قرار میدهد که به دقت دادهها کمک میکنند.
۷. اگر در کاربردهای مختلف استفاده شود ارزانتر است
تکنولوژی LiDAR زمانی که در کاربردهای در مقیاس بزرگ استفاده میشود، ارزانتر است. این به این دلیل است که خیلی سریع است و در زمان بسیار صرفه جویی می کند.
۸. دادهها میتوانند به سرعت جمعآوری شوند
به دلیل سرعت و دقت پالس لیزری از سنسورهای LiDAR ، دادهها میتوانند به سرعت و با نهایت دقت جمعآوری شوند. به همین دلیل است که حسگرهای LiDAR کار با ظرفیت بالا و کاربردهای فشرده مورد استفاده قرار میگیرند.
۹. اعوجاج هندسی ندارند
حسگرهای LiDAR بسیار دقیق هستند و بنابراین تحت تاثیر اعوجاج هندسی قرار نمیگیرند بنابراین دادههای جمعآوریشده دقیق خواهند بود و موقعیت دقیق شی در تصویر را ترسیم خواهند کرد.
۱۰. می توان آن را با منابع داده دیگر ادغام کرد
دادههای LiDAR میتوانند به راحتی با سایر منابع نظیر GPS و در نقشهبرداری و محاسبه فواصل استفاده شوند. این میتواند در نقشهبرداری از جنگل و دیگر فنآوریهای سنجش از دور اعمال شود.







